SMART ROBOTICS 2023
Conference Series takes immense pleasure and extends a warm welcome to attend the 11th European Summit on Robots and Artificial Intelligence to be held during October 23-24, 2023 in Rome, Italy.
The Smart Robotics mainly focuses on the theme of “Smart Living Machines for Sustainable Future” to develop and explore knowledge among the Robotics and Artificial Intelligence. Providing the right stage to present thought-provoking Keynote speeches, Oral Presentations, Plenary sessions, Discussion Panels, B2B Meetings, Poster Presentations, Video Presentations, Workshops, E-Posters and Exhibitions covering a range of topics and important issues which may be helpful for us all from the research to the practical implementations. Conference mainly deals with the purpose to increase awareness intentional method and ensures that Technologists, Professionals, Industrialists, Researchers, Innovators, and Students must have proper knowledge and qualification of a specific specialty
We are fulfilled to welcome you to visit and interface with us at the Smart Robotics 2023 on October 23-24, 2023 in Rome, Italy.
Why to attend?
With members from around the world focused on learning about robotics and artificial intelligence technologies, this is your single best opportunity to reach the largest assemblage of participants from the Robotics and Artificial Intelligence community. Conduct demonstrations, distribute information, acquire knowledge about current and trending robotic and artificial intelligence technologies, make a splash with a new research, and receive name recognition at this 3-day event. World-renowned speakers, the most recent techniques, tactics, and the newest updates in Industrial Robotics fields are hallmarks of this conference.
Target Audience
-
Mechanical Engineers
-
Automation and Robotics Lab Directors/Associates
-
Head of the Departments from the field of Artificial intelligence, Robotics, Mechatronics
-
Artificial Intelligence Researchers and Academicians
-
Robotic Technologist/ Robotics Doctorates
-
Defence Research Professionals
-
Control systems and Mechatronics expertise
-
Artificial Intelligence Lab Directors/Associates
-
Research and students
-
Professors from Universities
Special Issues:
All accepted abstracts will be published in all respective International Journals.
Abstracts will be provided with Digital Object Identifier by Cross Ref.
See more at: http://smartrobotics.conferenceseries.com/
Scientific Sessions
Track 1: Robotics
A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools or specialized devices through variable programmed motions for the performance of a variety of tasks. Robots are the largest growing technological devices in the world. They perform many functions ranging from space exploration to entertainment. Robots can be used in any situation and for any purpose, but today many are used in dangerous environments, manufacturing processes, or where humans cannot survive. Robots can take on any form but some are made to resemble humans in appearance. Many of today's robots are inspired by nature, contributing to the field of bio-inspired robotics
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Nano Robots in Cancer Treatment | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 02: Automation
Automation is the use of advancement to perform tasks with lessened human assistance. Any industry that encounters bleak tasks can use Robotics, yet automation is more transcendent in the endeavours of collecting, high-level mechanics, and auto, as well as in the domain of development in IT systems and business decision programming. Automation isn't exactly planned to override people. A part of that will happen as a result of dispensing with steps that require a human joint effort, yet the focus and advantages are found in productivity, consistency, and capability. This is the peculiarity of automation as you become useful using computer, human commitment becomes both more critical and less customary. Instead of considering computerization to be an instrument that wipes out positions, really it allows more experienced IT staff to focus on additional major problems and their responses, rather than mediocre, ordinary, repeated tasks.
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences | Artificial Intelligence in Software Testing | Robot Education.
Track 3: Robotics and Mechatronics
Robotics is the branch of innovation that arrangements with the configuration, development, operation, and utilization of robots. Mechatronics is the branch of science that consolidating hardware and mechanical designing. These incorporate Bio-enlivened movement for wheeled portable robots. Potential utilization of robots on additional physical bodies, Pneumatic counterfeit muscles for mechanical hand and Aero-space apply autonomy and challenges.
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 4: Micro Electro Mechanical Systems (MEMS) and Micro robotics
Micro Electro Mechanical Systems (MEMS) and Micro robotics research spans design methodologies, physical investigations and manufacturing techniques involving various micro sensors, micro actuators and other microsystems. Selected applications include inertial sensor suites for control and guidance, miniature wall-climbing robots using micro/Nano-fiber adhesives; arrayed MEMS probe manipulators for tip-based gas chemical sensor arrays for early warning systems, and ultra-compliant neural probes for brain-computer interfaces.
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Robotics Surgery | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 5: Artificial Intelligence
Artificial intelligence is a behaviour based-system concept in robot. Artificial Intelligence brings intelligent behaviour to the robot to be able to provide services to humans in unpredictable and changing environments, such as homes, hospitals, the work place, and all around us Artificial Intelligence is a way of making a computer, a computer-controlled robot, or a software think intelligently, in the similar manner the intelligent humans think. Artificial intelligence is accomplished by studying how human brain thinks and how humans learn, decide, and work while trying to solve a problem, and then using the outcomes of this study as a basis of developing intelligent software and systems. In the real world, the knowledge has some unwelcomed properties.
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 6: Medical Robotics
Medical robotics is an interesting discipline that is related to human health of all individuals. Their use is becoming popular due to their numerous advantages in the medical field. Medical robotics is a stimulating and modern field in medical science that involves numerous operations and extensive use of telepresence. The discipline of telepresence signifies the technologies that permit an individual to sense as if they were at another location without being actually there. Robots are utilized in the discipline of medicine to execute operations that are normally performed manually by human beings.
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 7: Robotics Surgery
To operate using the Robotic system, your surgeon makes tiny incisions in your body and inserts miniaturized instruments and a high-definition three-dimensional camera, and sometimes skin incisions are not required at all. Then, from a nearby console, your surgeon manipulates those instruments to perform the operation.
Think of the Robotics Surgery system like a video game. When you play a video game, you move a control button, and the machine translates your movements into real-time, mimicking your moves precisely on the screen. Your surgeon is in control the whole time; the surgical system responds to the direction he provides.
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 8: Deep Learning
Deep Learning is a machine learning technique that constructs artificial neural networks to mimic the structure and function of the human brain. In practice, deep learning, also known as deep structured learning or hierarchical learning, uses a large number hidden layers -typically more than 6 but often much higher - of nonlinear processing to extract features from data and transform the data into different levels of abstraction (representations).
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Track 9: Aerial Robotics and UAV
Flying opens new opportunities to robotically perform services and tasks like search and rescue, observation, mapping or even inspection and maintenance. As such, substantial interest in aerial robots has grown in recent years. Key areas to be addressed include, but are not limited to, innovative Unmanned Aerial Vehicles design, autonomous missions, guidance, navigation and control, airworthiness, multivehicle coordination, UAS traffic management (UTM).
Related Conferences:
Mechatronics and System Engineering Conference | Game Artificial Intelligence | Global Mechatronics Conference | Mechatronics Symposium | Rehabilitation Robotics | AI Planning and Scheduling | Artificial Intelligence conferences | Smart Robotics | Robotics Surgery | Deep Learning conferences | Humanoid Robots | Robotics and Automation Conferences.
Market Analysis
The global robotics process automation market size was valued at Japan 1.40 billion in 2019 and is projected to exhibit a compound annual growth rate (CAGR) of 40.6% from 2020 to 2027. The rising demand for automation of redundant tasks in the business process coupled with Artificial Intelligence (AI) and Machine Learning (ML) enhancements is expected to drive the market growth. The automation allows faster implementation, execution, and scaling of huge volumes of data resulting in less time consumption and reduced overhead expense of the companies. Moreover, the remote work scenario due to the COVID-19 pandemic is expected to reshape business operations, wherein companies would be inclined towards opting for Robotic Process Automation (RPA).
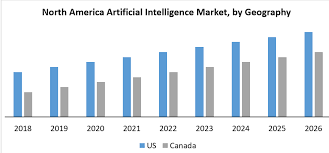
US Artificial Intelligence Market to Grow at a Staggering 75% CAGR until 2021: TechSci Research Report Rising Venture Capital Investments Coupled With Increasing R&D Activities in Autonomous Vehicles Market to Drive Artificial Intelligence Market in US Through 2021 According to TechSci Research report, "United States Artificial Intelligence Market, By Application, By Region, By End User Competition Forecast & Opportunities, 2011-2021", the artificial intelligence market in the US is projected to grow at a CAGR of 75% during 2016 - 2021 on account of growing artificial intelligence technology adoption in consumer electronic devices, research and developmental activities in healthcare industry, unmanned aerial vehicles, autonomous cars, etc.
This research evaluates enterprise robotics in the United States including companies, technologies, and solutions across industry verticals and applications. The report includes forecasts by industry vertical/application for 2017 through 2021.Leading industry verticals are beginning to see improved operational efficiency through the introduction of robotics and Artificial Intelligence (AI). Smart Robotics investment in many industries represents a substantial capital expenditure with the potential to dramatically reduce operational expenses through resource optimization, quality improvement, and waste reduction. Smart Robotics in business will accelerate as less expensive hardware and improvements in AI lead to improved cost structures and increased integration with enterprise software systems respectively. The massive amount of data generated by robotics will create opportunities for data analytics and AI-enabled decision support systems. Emerging areas for enterprise robotics include Robotics as a Service, Cloud Robotics, and General Purpose Robotics.
Past Conferences Report
Euro Robotic 2020
8th European Summit on Robots and Artificial Intelligence was organized August 24-25, 2020 with the support and contribution of the Organizing Committee Members. Firstly we must thank you for trusting us and participating at Euro Robotic 2020, a global platform to discuss various important aspects of Robots and Artificial Intelligence.The conference was organized around the theme “Surging into the future of Robotics and Artificial Intelligence”.
The conference proceedings were carried out through various Scientific-sessions and plenary lectures, of which the following Speakers were highlighted as Keynote speakers: Michaela Bercovitch (Sheba Hospital Israel), Eunju Park (South Korea), Fatungase (Nigeria). Scientific sessions discussed during webinar are about Robotics, Artificial Intelligence, Big Data Analysis, Medical Robotics, Robotics and Mechatronics
Robotics 2019
Conference series hosted the “7th International Conference on Robotics and Artificial Intelligence” during November 11-12- 2019 in Tokyo, Japan, with the theme “Infinite Connections of Robotics & Control Systems”. It was a great success, where eminent speakers from various reputed institutions and organizations with their resplendent presence addressed the gathering. The adepts who promulgated the theme with their exquisite talks were: James Gunderson (USA), Petter Falkman (USA), Prof. Randika K. W. Vithanage (USA), Farrokh Janabi-Sharifi (Canada), Lin Zhou (China). Scientific sessions discussed during conference are about Industrial Applications of Robotics, Big Data Analysis, Robotics and Mechatronics , Micro robotics , Cyber security
Automation & Robotics 2018
Conference series hosted the “6th World congress on Automation and Robotics” during April 16-17, 2018 at Las Vegas, USA, with the theme “Exploring topical innovations in Bots”. It was a great success, where eminent speakers from various reputed institutions and organizations with their resplendent presence addressed the gathering. The adepts who promulgated the theme with their exquisite talks were: James Gunderso (USA), Petter Falkman (Sweden), Farrokh Janabi-Sharifi (Canada), Tariq H. Tashtoush (USA), Eduard Babulak (USA), Mehran Mehrandezh (Canada). Scientific sessions discussed during conference are about Humanoid Robots, Big Data Analysis, Deep Learning, Intelligent Autonomous Systems and Robots ,
Automation & Robotics 2017
Conference series hosted the “5rd World Congress on Automation and Robotics” during June 28-29, 2017 at San diego,USA, with the theme “Automation and Robotics for a Sustainable Future”. It was a great success, where eminent speakers from various reputed institutions and organizations with their resplendent presence addressed the gathering. The adepts who promulgated the theme with their exquisite talks were: Olivier Toupet (USA), Eduard Babulak (Uk), Olivier Toupet (USA). Scientific sessions discussed during conference are about Robotics, Aerial Robotics and UAV, Deep Learning, Artificial Intelligence , Smart Robotics
Automation & Robotics 2016
Conference series hosted the “4nd World Congress on Automation and Robotics” during June 13-15, 2016 Philadelphia, Pennsylvania USA, with the theme “Automation and Robotics for a Sustainable Future”. It was a great success, where eminent speakers from various reputed institutions and organizations with their resplendent presence addressed the gathering. The adepts who promulgated the theme with their exquisite talks were:Tariq H. Tashtoush (USA), Dr. Ashitey Trebi Ollennu (USA), James P Gunderson (USA), Eduard Babulak (Uk), Olivier Toupet (USA). Scientific sessions discussed during conference are about Big Data Analysis, Industrial Applications of Robotics, Deep Learning, Robotics and Mechatronics , Deep Learning
We would like to organize this conference with your support to gather all the Robotic Researchers in a single platform hope we will be honored with your support to organize Smart Robotics Conferences in a grand level, your support will be the key of success for our next year conference.
We look forward to see your presence with active contribution and support to make this event successful once more.
Once again it’s our pleasure to welcome you to our upcoming 11th European Summit on Robots and Artificial Intelligence, October 23-24, 2023 in Rome, Italy.
.
Let us meet again @ Smart Robotics 2023






